机器人的主要组成部分
发布人:张建辉发布时间:2018-09-22 21:26:04
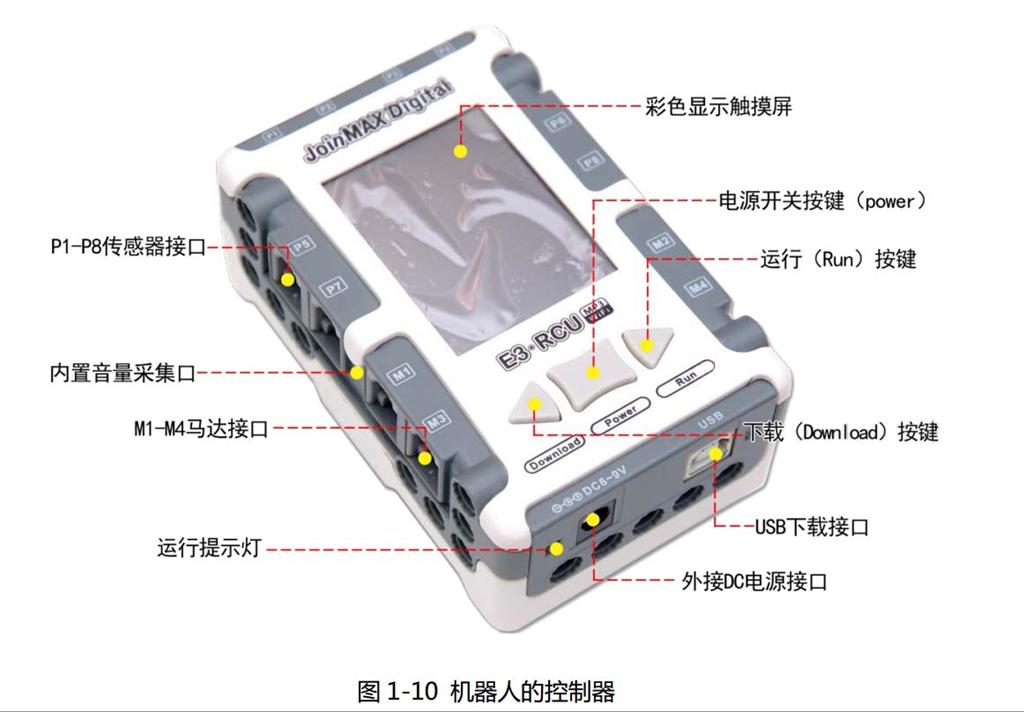
第一,机器人要有“控制器”,控制器是机器人的核心。其实控制器就是一台计算机,这台计算机可能和我们传统意识中的计算机“长得不一样”,它被简化成了一个“小盒子”(参见:图 1-10)。但这台计算机是冯•诺依曼结构的。
所以,有些人说机器人就是可以动的计算机。很有道理,但不全面。因为我们制作的机器人可以是不会动的,但也许它可以说话、唱歌、显示表情、闪彩灯等。
第二,机器人要安装各种“传感器”。因为机器人的核心是控制器,而控制器就是一台计算机。计算机需要有输入设备和输出设备与外界交流,而“传感器”就是机器人的输入设备。
计算机的输入设备包括:鼠标、键盘、麦克风、扫描仪等,机器人也可以安装这些输入设备,但只有这些是不够的。机器人要想感知这个大千世界,需要有触觉、听觉、视觉等。人们开发了很多种传感器来完成这些输入(参见:图 1-11)。

有了这些传感器,我们的机器人就长了眼睛、耳朵、鼻子……
第三,机器人要安装各种特殊的输出设备。
计算机的输出设备包括:显示器、打印机、音箱等,机器人也可以安装这些输出设备,但这些还不足以让机器人动起来。所以机器人拥有很多特殊的输出设备,如:电机或者马达(参见:图 1-12)、液晶显示、数码管显示、蜂鸣器等。
