自动路闸的搭建
发布人:张建辉发布时间:2018-11-01 16:18:50
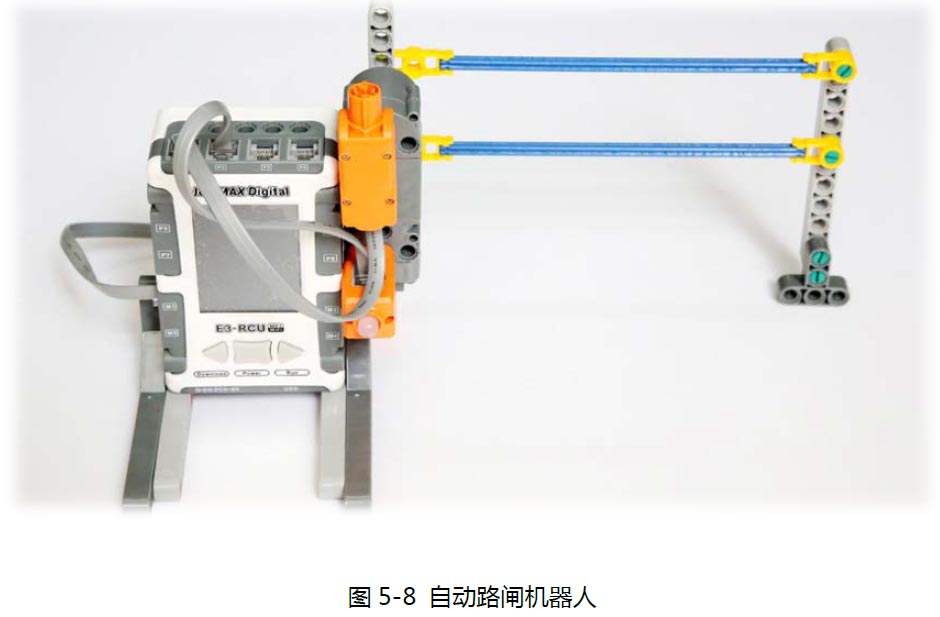
第一章我们已经提到过,自动路闸是符合机器人定义的,所以是机器人的一种。今天我们要做的这个自动路闸机器人比较简单(参见图5-8)。
我们今天要用到的零件很多(参见图5-9),但同学们不一定要和教材上做的一样,完全可以自己开发。但开发原则是“用最少的零件干最多的事”,也就是说,在功能相同的情况下,用的零件数越少说明你的水平越高。

注意,零件中用到了两个“虚销”(绿色的),还用到了两个“A 型雪花”(带圆孔)。
这两个虚销用在什么地方呢?用在升降杆的末端(参见图5-10)

整个机器人上用到了4 件电子器件(参见图5-11)。

既然是机器人,就必须有控制器。升降杆可以动,是因为装了电机,电机接在控制器的M1 接口上。触碰传感器模拟的是一个按钮,接在控制器的P1 接口上。作为提示灯用的“彩灯”,接在控制器的P2 接口上。
机器人的工作过程:按下按钮,升降杆抬升,5 秒钟后,升降杆落下。升降杆落下后彩灯亮起红色,抬起时亮起绿色。
这是我们第一次用彩灯,彩灯可以通过编程控制亮灭和颜色。
一般情况,电机(马达)要接M 接口,传感器和彩灯要接P 接口。
下面我们从三个角度来观察一下这台自动路闸机器人(参见图5-12、5-13、5-14)。



同学们可能已经注意到了,升降杆的连接是一个平行四边形,这就是平行四边形传动。平行四边形传动在传动时末端和前端始终保持平行。现在,越来越多的小区门口使用这样的升降杆,中间还贴有百叶窗式的广告。