任务1:小车向前冲
发布人:张建辉发布时间:2018-11-06 17:26:43
任务描述:车型机器人向前走2 秒,然后停车。
下面是参考程序(参见图7-10):
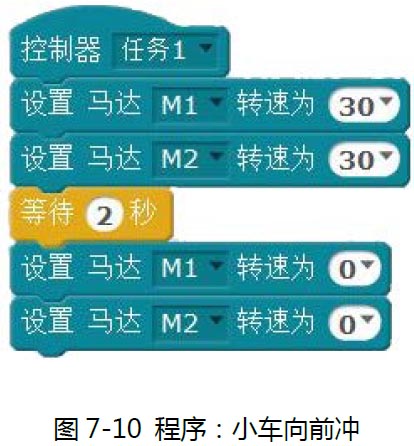
程序很容易理解,M1、M2 上分别接着左、右两个电机(马达),它们同时旋转,转速为30,小车就向前走了。2 秒钟之后,两个电机的转速为0(或者说电机停转),也就是小车停车了。应该是没问题了吧?好,来测试一下。

小车并没有“向前”冲,而是原地打转儿。这是怎么回事?
那要从电机说起。在编程时,电机的转速设置为正数,我们说这时的电机是正转的。但是电机是立体的,在安装之后怎么来定义这个“正转”呢?
如下图(参见图7-12)把电机平放,“转子”向右,这时的电机正转就是顺时针旋转。

我们再来观察一下基本车,两个轮子是对称安装的。如果都在程序中设置为“正转”(正数),那肯定有一边是正转,而另一边是反转的。也就是说,小车的两个电机对称安装,所以转向相反(参见图7-13)。

如何解决这个问题呢?
思路1:在程序中,把其中一个轮子的转速设置为负数。但这样太麻烦了!因为以后的程序必须总想着这件事儿,而且很容易就弄反了。
思路2:在控制器中把一个接口永久性的设置为反向,这样以后编程时就不用考虑这个问题了。
我们当然是选择“思路2”。
第二个问题,在上面的实验中,到底是哪边的电机转反了呢?是左电机(M1)转反了,还是右电机(M2)转反了呢?
经过观察,我们发现是左电机(M1)转反了(参见本章的配套微课视频《第8 课 车型机器人》)。所以下面要把左电机(M1)设置为反向(参见图7-14)。

第一步:在控制器上选择“内置测试”菜单,然后选择“马达”工具。
第二步:进入“马达测试”界面,电机就自动开始旋转了。按一下“手动”,电机就停下来了。
第三步:如上图3 所示,在M1 后面的双色矩形上按一下,双色就反过来了。这就是令M1 反向旋转的方法,可以按“退出”返回到菜单界面。
我们再次测试程序,小车前进,2 秒后停车,没问题了。