左右驱动轮对机器人移动的影响
发布人:张建辉发布时间:2018-12-06 15:25:24
上一章的车型机器人只能走直线,而本章的小车要走曲线。那么如何走曲线呢?这就需要我们来探讨一下小车的转向问题。
一、汽车转向
说到让小车拐弯,同学们可能第一个想到的就是汽车转向。汽车的转向系统实际上很复杂(参见图 8-1),一般我们称之为:“平行四边形”转向。

汽车转向轮的工作原理类似于下面的示意图(参见图 8-2):

这种转向对于基本车来说太复杂了,我们不准备采用这种方式转向。那本章中的机器人用什么方式转向呢?
二、坦克转向
同学们对坦克一定不陌生吧,坦克的轮子一般会套在履带内,而且有很多个。
那么,坦克是如何转向的呢?下面的图片是一个坦克车的模拟器(参见图8-3),这个模拟器装有两个电机,通过对两个电机输出功率的控制,就可以实现坦克车的转向。

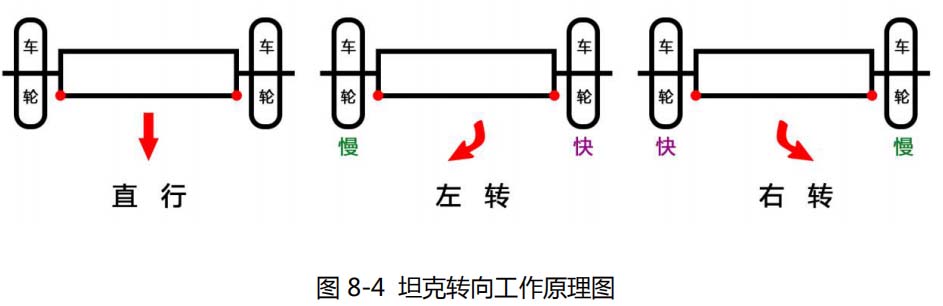
坦克车的转向策略是,通过两个车轮的速度差来实现转向(参见图 8-4)。
再来对比一下上一章学习搭建的基本车(参见图 8-5),它是由两个驱动轮(电机驱动)和一个随动轮(万向轮)组成。我们也可以通过改变两个驱动轮的速度差令其转向。

这种转向方式用基本车实现起来较为简单。所以,这一章我们采用坦克的转向方式来使基本车转向从而完成下面的任务。
三、转向的多种情况
有了上面对坦克车转向的认识,下面提出一些问题,同学们来思考一下:
问题 1:两个轮子一个快,一个慢,小车会怎样运动?
问题 2:两个轮子一个转,一个停,小车会怎样运动?
问题 3:两个轮子一个正转,一个反转,转速相同,小车会怎样运动?
通过观看本章的配套微课视频《第 9 课 听话的小车》,同学们可以看到实验结果。
问题 1 的答案是:小车会走出一条曲线,而且会拐向慢的一边。
问题 2 的答案是:小车会以停转的轮子为中心,朝着停转轮子的方向原地旋转。
问题 3 的答案是:小车会以两轮之间为中心,朝着反转轮子的方向原地旋转。
有了上面的认识,下面我们将左、右驱动轮对小车移动影响的各种情况以表格方式呈现出来:
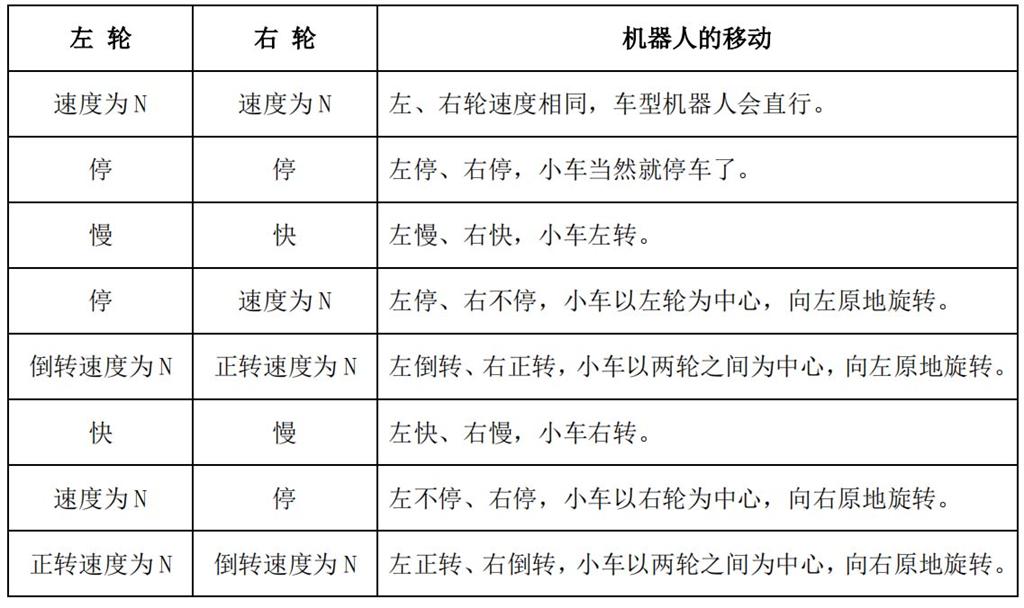
希望同学们把上面这个表的内容彻底看懂,在胸有成竹的状态下再编程,小车就真的“听话”了。