单光寻迹的原理
发布人:张建辉发布时间:2018-12-07 19:39:41

在电影中,飞船上的机器人生活的“井井有条”,不知道同学们发现了没有,这些机器人在移动时都有一个共同的特点,这个特点就是在机器人的下面都有一条白线,而机器人的移动都是顺着白线在动(参见图 10-2)。
这种顺着线移动的方式,就是:循迹。
下面来看看同学们自己制作的循迹机器人(参见图 10-3)。
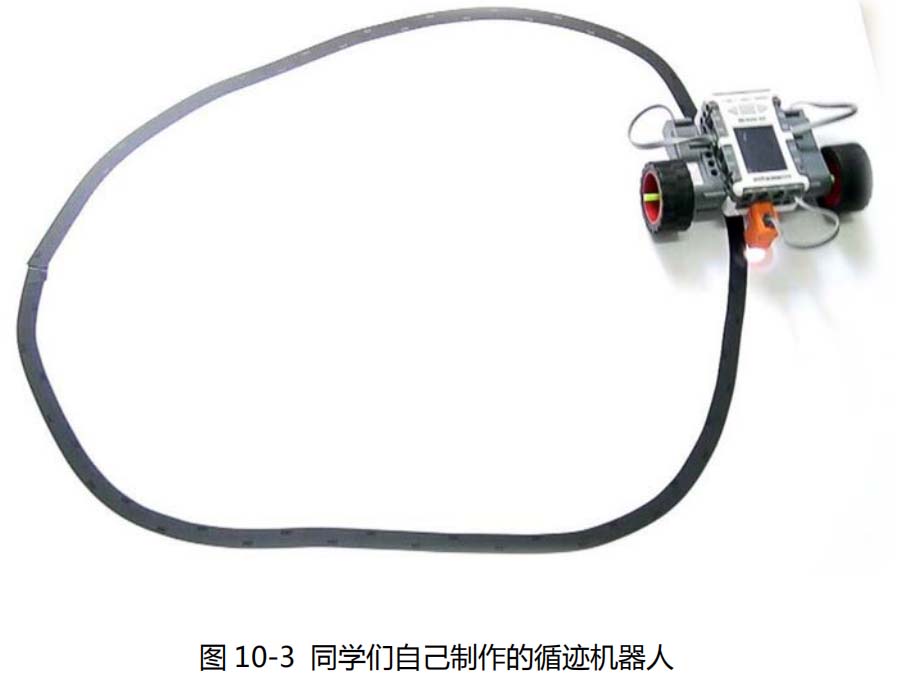
这辆小车,就是本章要完成的任务。它有一个(而且只有一个)光电传感器用于循迹运动,所以称为:单光循迹。
下面我们来理解一下单光循迹的原理。首先,单光循迹有两种情况:光电传感器在黑迹的左边、光电传感器在黑迹的右边(参见图 10-4)。
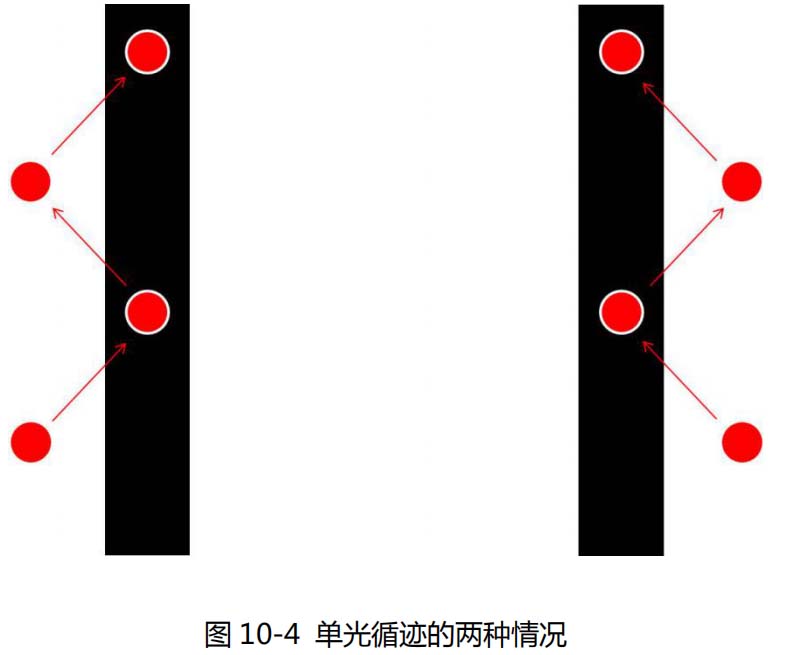
以光电传感器在黑迹的左边为例。
红点代表光电传感器,如果在白区,就向黑迹边“转向”边“移动”;如果到黑迹上了,就向白区边“转向”边“移动”。这样,小车就顺着黑迹的左边缘“左右挪动着”前进了。
上面对单光循迹的原理描述的比较简单,同学们可以参照本章配套的微课视频《第 11 课 单光循迹》来学习这部分,在视频中有更加详细的讲解,并配有动态说明。