双光寻迹的原理
发布人:张建辉发布时间:2018-12-22 10:12:54

上一章我们学习的“单光循迹”小车是在基本车的基础上安装了一个光电传感器,本章学习“双光循迹”,也就是在基本车的基础上安装两个光电传感器(参见图 11-1)。
那么,为什么在学习了单光循迹之后还要学习双光循迹呢?原因主要有两个。
第一,单光循迹与双光循迹的程序设计思想是不同的,或者说虽然都是循迹,但从方法上看根本就不是一回事儿。学习两种循迹思路,有助于拓展思维,培养多元化解决问题的能力。
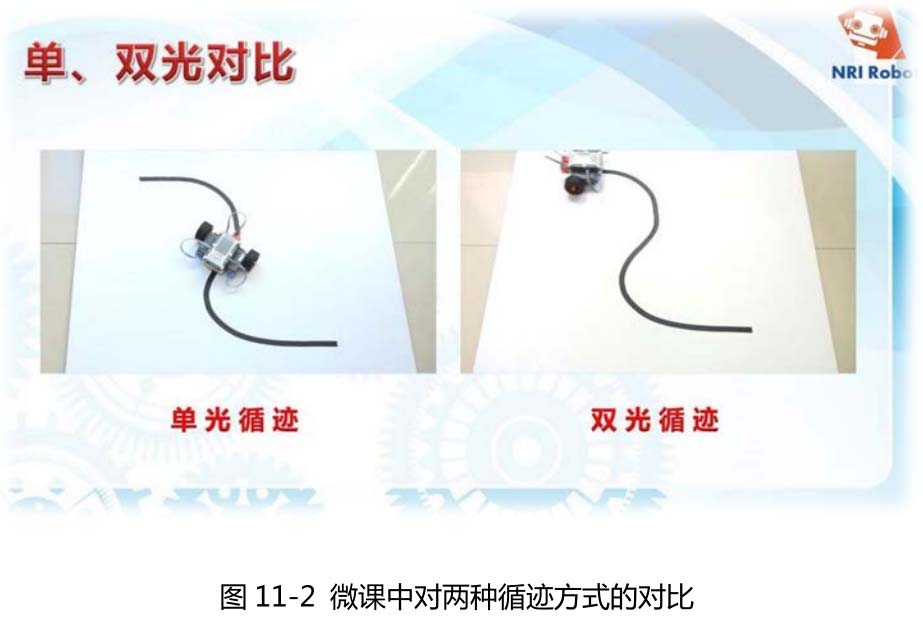
第二,通过观看本章配套微课视频《第 12 课 双光循迹》上对两种循迹方式的对比(参见图 11-2),可以看出双光循迹比单光循迹要更快、更平稳。
从“算法”的难度上说,双光循迹的理解难度要大一些,但是同学们通过努力一定可以掌握双光循迹的算法。
下面我们来理解一下双光循迹的原理,如下面两图所示,红色圆形代表光电传感器。
在双光循迹的时候,过程中分为两种情况。
第一种情况是两个光电传感器都在白区(参见图 11-3),黑迹被两个光电传感器夹在中间,但都没有碰到。这种情况下就直行,这时的移动效率最高。
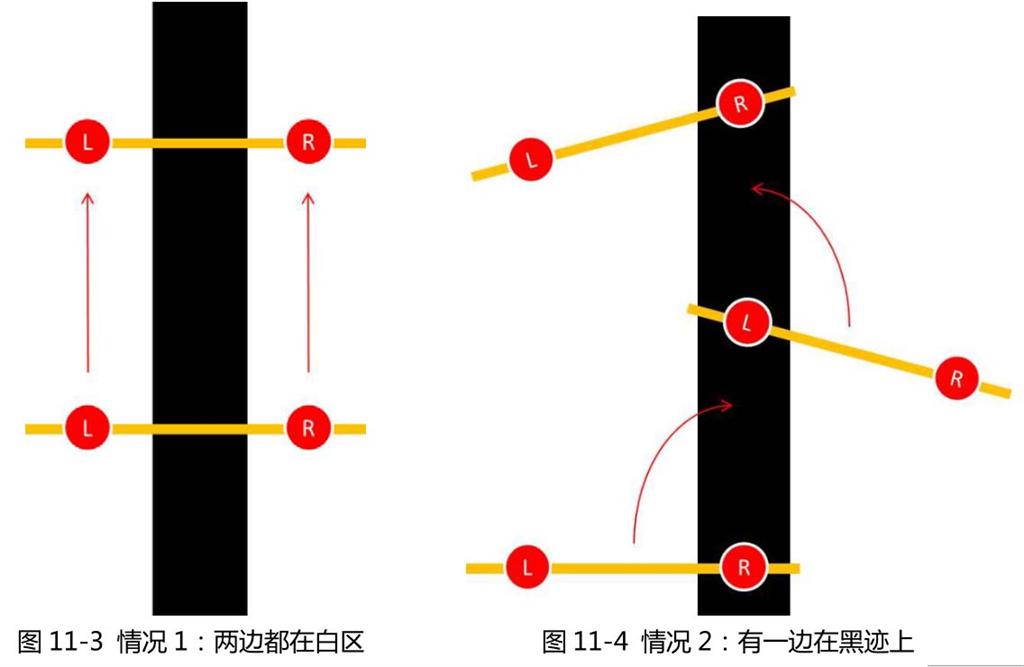
第二种情况是有一边的光电传感器压在了黑迹上(参见图 11-4),比如图中的情况,一开始右边的光电传感器压在了黑迹上,这时我们让小车向右,边转弯边移动,也就是右拐。移动了一会儿,右边的传感器离开了黑迹,左边的压上了。我们就让小车向左,边转弯边移动,也就是左拐。移动了一会儿,左边的传感器离开了,右边的又压上了……
就这样,小车一扭一扭的就顺着线走了。
不知道大家发现规律了没有?无论是情况 1 还是情况 2,无论是左边的传感器,还是右边的传感器,只要是在白区,这个传感器所在一侧的电机跑的就快;只要是在黑迹上,这个传感器所在一侧的电机跑的就慢(参见图 11-5)!
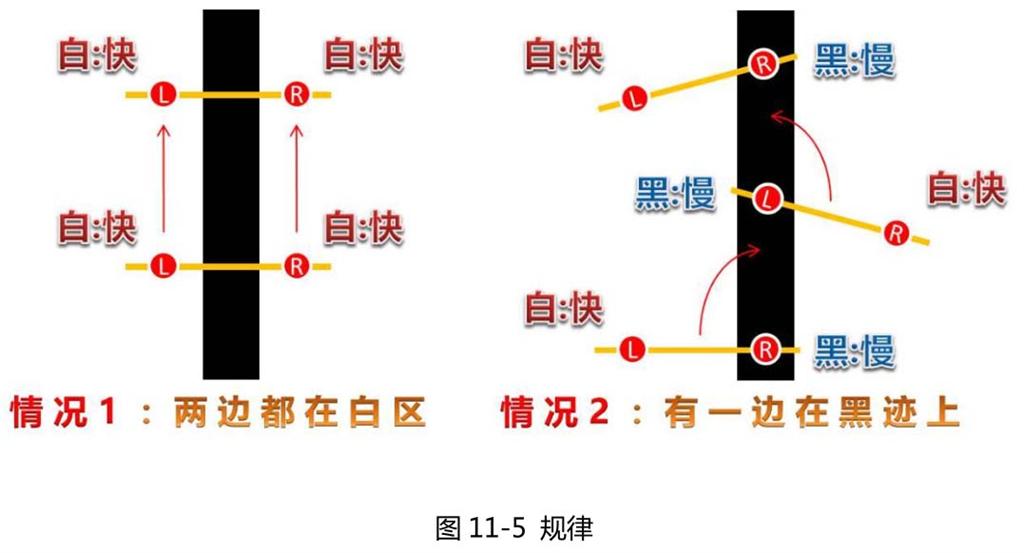
在情况 1 中,左右两个传感器都在白区,所以我们可以让小车两侧的电机都快快地转,于是小车就直行了。
在情况 2 中,右侧传感器压黑色了,就要向右转,也就是左侧电机快,右侧电机慢,或者说哪边在白色,哪边快,哪边在黑色,哪边就慢。
看明白这个算法了吗?
算法总结成一句话就是:传感器在白色区域,它这一边的电机转的就快,传感器在黑色区域,它这一边的电机转的就慢。
再简化一点就是:无论是哪一边,压在白色上,就快;压在黑色上,就慢。
上面对双光循迹的原理描述地比较简单,同学们可以参照本章配套的微课视频《第 12 课 双光循迹》来学习这部分,在视频中有更加详细的讲解,并配有动态说明。