任务2:寻迹小车比赛
发布人:张建辉发布时间:2018-12-22 10:21:08
一、秒表
在上一章最后的“练习与思考”中,我们留了一个比赛:来一场“汽车拉力赛”,看谁的小车第一个到达终点!
通过观看本章配套的微课视频《第 12 课 双光循迹》你会知道:双光循迹比单光循迹要快的多!当然,循迹的速度也取决于程序中的具体参数和对车体结构搭建的优化。
“秒表”(参见图 11-11)是比赛的标准配备,下面我们来学习一下秒表的使用。

按左键开始计时,再次按左键可以停止计时,按右键可以重置为 0。
同学们可以在比赛时大声喊出口令:5、4、3、2、1、跑!迅速按下左键,这样就开始计时了。当小车到达终点,再次按下左键,此时就可以读取秒数了。
二、带按钮的寻迹小车
比赛时,我们一般要在循迹小车上安装按钮(触碰传感器)。这样在裁判发出口令“跑”时,只要按下小车上的触碰传感器,小车就跑出去了。
下面是带按钮的循迹小车搭建后的样子(参见图 11-12、11-13)。


上图是从侧面看,可以看到触碰传感器安装在了控制器的 P3 口上。(左边的光电传感器是 P1 口,右边的光电传感器是 P2 口。)
下面是参考程序(参见图 11-14):

比起“任务一:双光循迹小车”的程序,仅仅多了一个等待指令。在按下触碰传感器之前小车是静止的,当裁判发出口令“跑”时,按下触碰传感器,小车就进入了循迹的程序块中。
在比赛时,如果是在桌子上制作的赛道,一定要注意别摔了小车。
最后,祝大家循迹大赛玩的愉快!
练习与思考
今天我们学习的双光循迹是“循黑迹”。下面来看一张奇怪的跑道(参见图 11-15),这张图是一张可以用于比赛的正式“赛道”(可以联系“NRI 奇思机器人教育”购买)。本章配套的微课视频《第 12 课 双光循迹》中有在这张赛道上跑车的视频。

仔细观察可以发现这张赛道的“不寻常”之处,主要是轨迹的样子(参见图11-16)。两边是黑色,中间是两道白色,最中心是一道黑线。
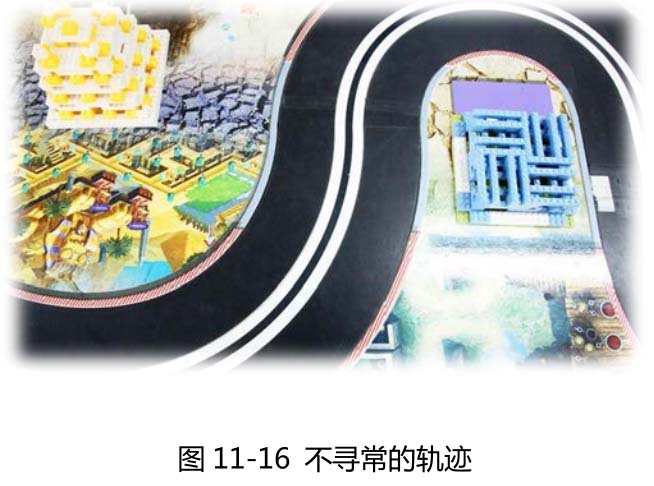
这样的轨迹如何能循呢?这样的轨迹使用什么样的循迹算法呢?
这里推荐一种方法,就是把这条特殊的轨迹看作是“白迹”,在中间白迹的两侧安装光电传感器(忽略中心的黑线)。
如下图,把今天的双光循迹小车改造一下,就可以当作是“循白迹”了(参见图 11-17)。

让我们来近距离看看这辆被改造过的车(参见图 11-18)。这辆车的特点是两个光电传感器离的比较远。

那“循白迹”的程序是什么样的呢?下面是参考程序(参见图 11-19):

这个程序和“循黑迹”的程序类似,作为课下探究留给同学们自己分析。